Labview Serial Monitor

Posted:
Sun Oct 03, 2010 5:44 pmby Mitch
This is something I've been playing with. I initially used it to explore configuration and PID loops. This is a labview project that parses the "TA" line from the gluonpilot telemetry on the serial port and displays graphs and an attitude indicator. Definitely not necessary for setup but it provides a higher resolution attitude indicator and real time graphs. Probably a good basis for someone who wants to do more configuration stuff using labview. It could use some improvement but works well enough. I borrowed the attitude indicator portion from a different web site. I've attached two zips with an executable and the source. You may have to install the appropriate labview runtime to run the executable stand alone. It's available here
http://joule.ni.com/nidu/cds/view/p/id/1383/lang/en
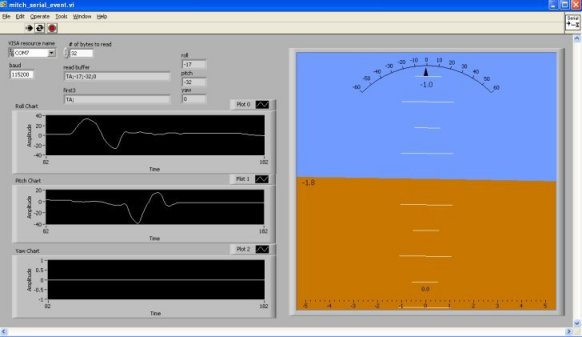
- labview_adi.jpg (28.27 KiB) Viewed 5663 times
Re: Labview Serial Monitor
Posted:
Mon Oct 04, 2010 3:44 pmby Tom
Thanks for sharing Mitch!
Did you have any success using this method to improve the quadrocopter stabilization?
Is the advantage big enough to include it in the gluon config?
Re: Labview Serial Monitor
Posted:
Mon Oct 04, 2010 5:49 pmby Mitch
I used it to observe step responses for quad PID testing but switched my board back into airplane mode before I really had the quad dialed in. I think it is marginally fast enough to do that using telemetry over a serial port. Ideally a dedicated analog sensor and dedicated high speed ad converter such as a NI DAQ board would enable higher resolution if we really wanted to observe the responses in detail.
My primary interest in this and the quad are to learn more about motor/prop/esc responses and roll stability for application in my vtol which has a much lower natural frequency due to larger moments and greater mass in the wing, and props.
I don't feel it is a necessary part of gluonconfig but made it available for anyone who wants to dig a bit further or use it as a basis for other code. Once we have a few good data sets for quad stability i think it will be routine to perfect quad stability from the known parameters.